
快速通道

三坐标-关于复合位置度的测量
2013-07-02 10:20:52 来源: 西安爱德华测量设备股份有限公司 邓小锋 郭帅帅 点击:
摘要:本文详细说明了复合位置度的具体意义,GB中的标示以及在AC-DMIS中复合位置度检测的原理和方法。
关键词:复合位置度 三坐标 PLTZF FRTZF 阵列位置公差 形体相关公差 孔系
一、引言
随着制造业的全球化,我们越来越多的会接触到国外的图纸,国外的标注方式.复合位置度就是我们经常碰到的一种美式标注方式。要了解复合位置度,我们先回顾一下位置度,位置度是指被测要素所在的实际位置对其理想位置的允许变动范围。位置度公差有点的位置度、线的位置度和面的位置度。
而在实际加工中,孔系阵列的位置度(即复合位置度)则较为常见。复合位置度公差(如图一) 不仅给出了孔系相对于基准的定位公差,而且给出了各个孔系之间的相互位置公差,与传统的只给出孔系相对于基准的定位公差相比,有较好的经济性,因此得到了广泛的应用。
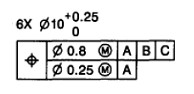
图一
二、复合位置度
复合位置度是ASME Y14.5 M即美国机械工程师学会制定的“尺寸和公差标准”的一种标法,主要应用于阵列形体,即一组具有相同尺寸大小和形状并按一定规律排列的形体。阵列形体通常需要用上下框格的位置度控制:
上框格描述的是阵列形体作为一个整体的位置度公差,称为 阵列位置公差 Pattern-Locating Tolerance Zone Framework(PLTZF)
下框格描述的是阵列中各个形体相互之间的位置和方向公差,称为 形体相关公差Feature-Relating Tolerance Zone Framework(FRTZF)
从英文描述可以看出,上下框的公差都不是针对每一个具体的孔,而是一个几何图框(Framework),上框用于定位(Locating)它是由基准A、B、C及距离基准的理论尺寸所确定,所确定的几何图框是确定的。下框是各个孔间的联系(Relating)它由孔间距的理论尺寸所确定,所确定的几何图框不含基准,仅仅是各孔之间的联系。
上框的基准用于几何图框的定位,下框的基准用来控制几何图框移动的方向。
下框(FRTZF)内如规定了基准,实际上就是控制了FRTZF相对于PLTZF移动的方向。如图一中的FRTZF,实际就是表示每个孔相对与基准A的垂直度,不可以相对于A倾斜,但可以在PLTZF中所确定的直径0.8的圆内移动或者旋转。若FRTZF含有两个基准A和B,那就代表直径为0.25的圆柱体只可以沿C基准方向移动。目的是通过FRTZF不断的移动使每个孔的轴线处在PLTZF和FRTZF的公差重合区内。注意,PLTZF是固定不动的。
复合位置度在GB中的标注,如图二,
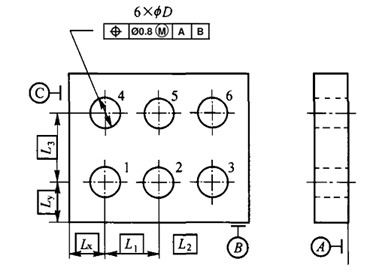
图二 GB中关于孔系的标注
在GB中位置度公差针对的仍然是一个几何图框,它由理论正确尺寸按确定的几何关系联系在一起作为一个整体。如图所示,矩形布置的六孔组有位置度要求,六孔之间的相对位置关系由保持垂直关系的理论正确尺寸L1、L2、L3确定,该几何图框的理想位置由基准A、B和定位的理论正确尺寸LX、Ly 来确定。由此可知,在GB中,位置度后面的基准不仅控制了位置而且控制了几何图框移动的方向。
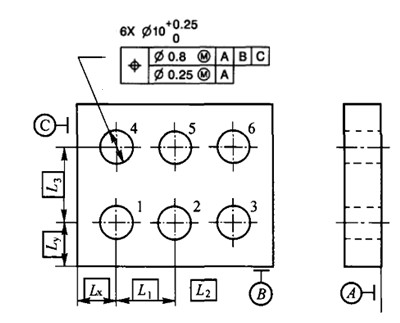
图三 ASME 中关于孔系的标注
图三为孔组复合位置度标注的示例。
上框格(PLTZF)给出了一个几何图框的位置度, 几何图框由6个孔间距(L1、L2、L3)及相对基准A、B、C位置(Lx、Ly)组成的它是的,6个孔的轴线必须位于图框所示的6个直径为0.8mm的圆柱体内。
下框格(FRTZF)是给出了6个孔相对距离为理论尺寸的一个几何图框,该几何图框不含基准A、B、C,仅仅由L1、L2、L3确定。从后面所带基准可以看出,只是限制了相对于A的倾斜(垂直度),故该几何图框可在上框格所确定的公差带内平移和旋转(但不可以倾斜),只要各孔的实际轴线位于上下框格所确定的重合区域内,孔组位置度即为合格。
三、AC-DMIS中关于复合位置度的检测
AC-DMIS测量软件是目前应用于坐标测量机广泛的的测量软件之一.该软件操作简单方便,算法经德国物理研究院(PTB)认证.下面就简单介绍下该软件计算复合位置度的原理和方法.
复合位置度的测量原理:上框格的位置度可以通过建立对应的坐标系,软件很好实现,比较麻烦的主要是下框格的位置度。因为下框格的基准不是固定的,软件中通过拟合每个孔建立拟合后的坐标系进行判定,由于每个孔都参与了坐标系的拟合,所以各个孔之间的相对位置关系在坐标系中得以体现。

图四
测量步骤:
① 根据基准体系及确定被测要素的理论正确位置的两个理论正确尺寸的方向建立坐标系,使该坐标系的某两轴方向平行于理论正确尺寸的方向,基准点为原点并保存。
② 测量被测要素(结果中理论值为理论正确尺寸)生成结果。注意:被测元素同为圆或同为圆柱。
③ 打开复合位置度界面如(图四)所示。
将被测元素拖入到测量元素栏中,分别输入PLTZF和FRTZF中的公差。
④ 设置对应被测元素和基准元素的公差规则、扩展公差评定和名称,设置完成后点击“确定”按钮。
⑤ 生成复合位置度结果。上下层结果分别为无公差规则实体补偿的结果和有实体补偿的结果。A为旋转量,T1T2分别为平移量。

小结
随着制造业的发展,三坐标的应用已经越来越广泛,操作越来越人性化,精度越来越高,软件功能越来越强大,三坐标已经不仅仅满足于日常的几何量测量,像AC-DMIS中的齿轮测量、、蜗轮蜗杆测量、叶片测量、凸轮测量、螺纹测量、样板测量等等已经广泛地应用到到了航空航天,汽车,高铁等各个领域。
参考文献
1. 赵则祥 张雪松《国外几何公差标准释义》-北京:中国标准出版社,2008
2. 甘永立 《几何量公差与检测》-7版。-上海:上海科学技术出版社.2005.7
3. AC-DMIS 5.1.39软件说明 -西安德翼软件有限公司,2012
4. GD&T ASME Y14.5 M -2009
5. GB/T1182-1996
上一篇:三坐标测量机的验收标准
下一篇:如何正确选择三坐标测量机测头